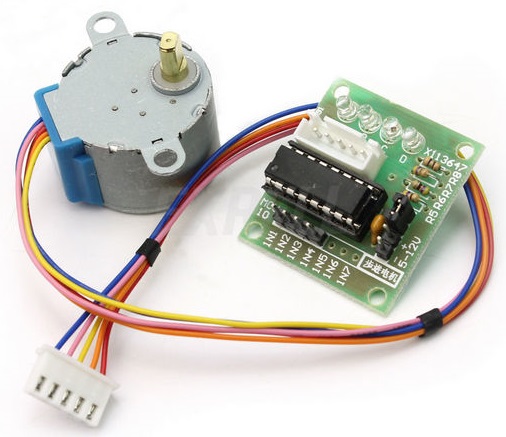
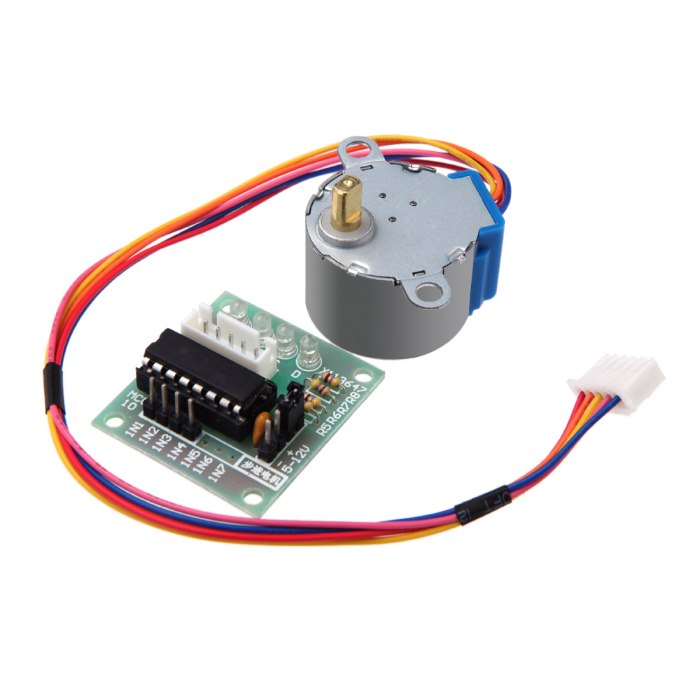
Униполярный (однополярный) 4-фазный шаговый двигатель с редуктором и c платой драйвера . Применяется для дискретного (пошагового) вращения валом двигателя какого либо предмета (шестеренки , колеса , подвижного механизма). Используется в роботехнике, DIY-устройствах, поворотных жалюзи кондиционеров, небольших вентиляторах и т.п.
Основные характеритики:
-
Тип мотора: униполярный шаговый двигатель
-
Модель двигателя: 28BYJ-48
-
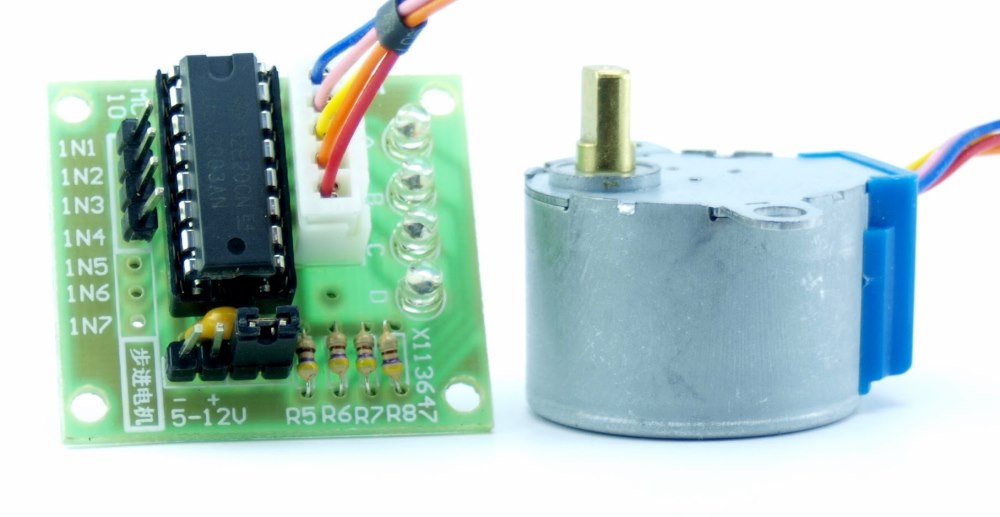
Микросхема драйвера: ULN2003AN
-
Номинальное рабочее напряжение: 5 В
-
Подключение: 5-выводов
-
Число фаз: 4
-
Шаг двигателя: 5.625 °/шаг
-
Передаточное отношение редуктора: 1/64
-
Частота: 100 Гц
-
Сопротивление по постоянному току: 50 Ом ± 7%(25°C)
-
Частота под нагрузкой: > 600 Гц
-
Частота на холостом ходу: > 1000 Гц
-
Крутящий момент: > 34.3 мН*м (120 Гц)
-
Момент самопозиционирования:> 34.3 мН*м
-
Стопорящий момент: 600-1200 г*см
-
Тяга: 300 г*см
-
Сопротивление изоляции: > 10 МОм (500 В)
-
Класс изоляции: A
-
Шум: < 35 дБ (120 Гц, без нагрузки, 10 см)
-
Вес: 40г
Таким образом в 4-шаговом режиме двигатель с редуктором совершает 2048 шагов за один оборот , в 8-шаговом - 4096. Технической документацией рекомендован именно полушаговый режим (8-шаговая управляющая сигнальная последовательность).

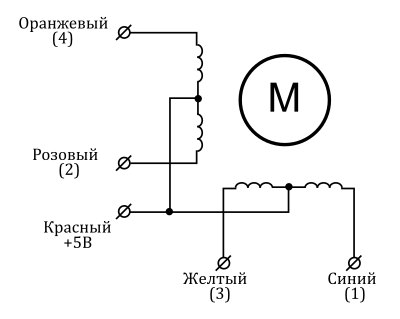
Подключение к контроллеру ULN2003 A (синий), B (розовый), C (желтый), D (Оранжевый), E (красный, средний вывод обмоток).
Плата драйвера имеет разьем для подключения шагового двигателя и для питания драйвера. Светодиоды отображают состояние подачи питания на фазу двигателя .
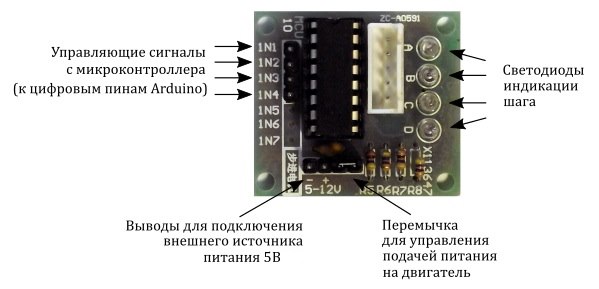
Также сбоку расположен джампер (два вывода под четырьмя резисторами), установка которого позволяет подавать питание на шаговый двигатель. Подавать питание от Arduino контроллера не рекомендуется, так как двигатель потребляет большой ток и может повредить контроллер. Наиболее подходящим способом является питание от сетевого адаптера (блока питания) 5В выдающий ток не менее 1 А или батареи. Если для питания Arduino и мотора используются различные источники питания, то необходимо объединить выводы «земля» источников вместе. Четыре управляющих входа помечены как IN1-IN4 и должны быть подключены к четырем цифровым выводам Arduino.
Стандартная библиотека Stepper, идущая с Arduino IDE, поддерживает только полношаговый метод управления и имеет сильно ограниченные возможности. Использовать ее можно только в очень простых приложениях, в которых используется только один мотор. Применение библиотеки Stepper для управления 28BYJ-48 является не самым эффективным решением.
Есть решение получше — это использовать библиотеку Accel Stepper. Эта библиотека очень хорошо работает совместно с шаговым мотором 28BYJ-48 (мотор почти не греется), а также поддерживает ускорение, что позволяет заставить мотор вращаться быстрее.












 Дані, представлені в описі товару є довідковими і можуть відрізнятися від зазначених виробником.
Дані, представлені в описі товару є довідковими і можуть відрізнятися від зазначених виробником.