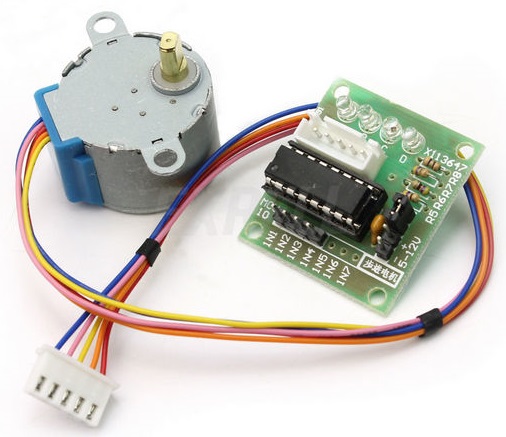
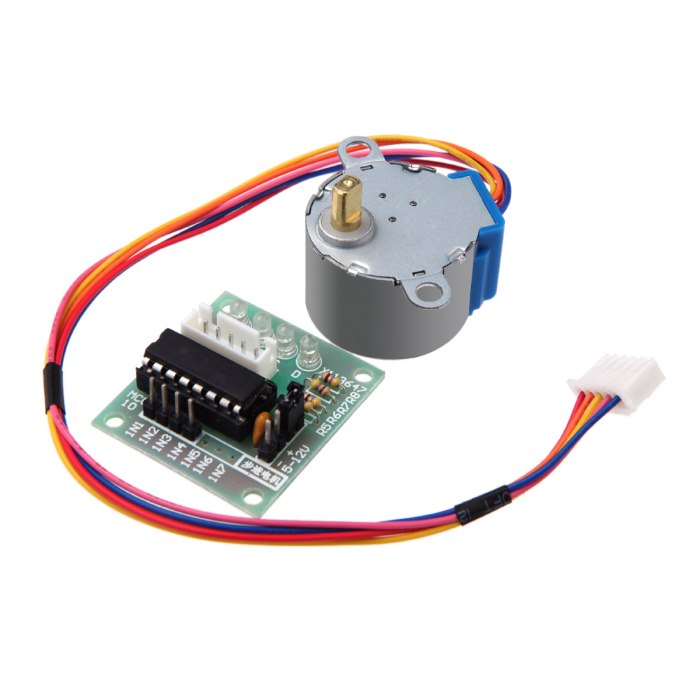
Unipolar (unipolar) 4-phase stepper motor with gearbox and driver board. It is used for discrete (step-by-step) rotation of an object (gear, wheel, movable mechanism) by the motor shaft. Used in robotics, DIY devices, air conditioner swing blinds, small fans, etc.
Main characteristics :
-
Motor type: unipolar stepper motor
-
Engine Model: 28BYJ-48
-
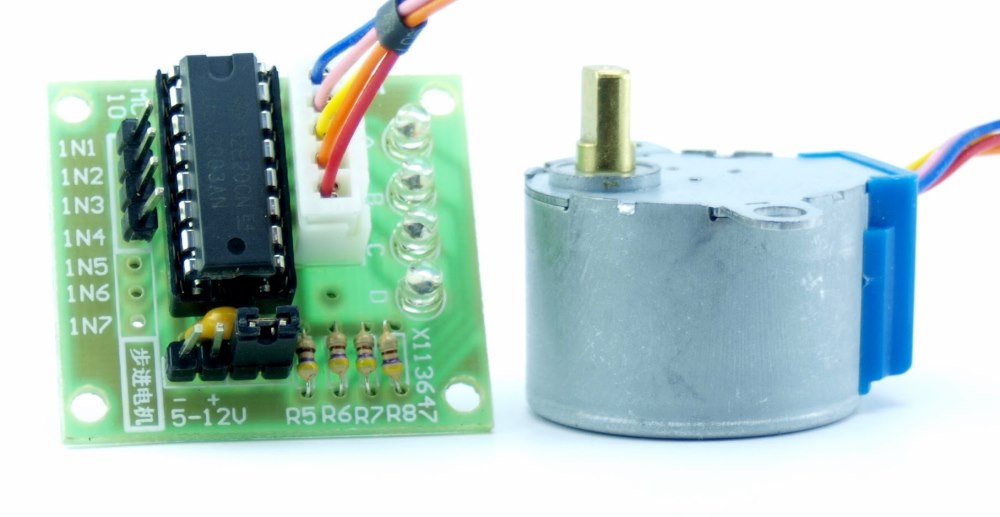
Driver chip: ULN2003AN
-
Rated working voltage: 5V
-
Connection: 5-pin
-
Number of phases: 4
-
Motor step: 5.625°/ step
-
Gear ratio: 1/64
-
Frequency: 100 Hz
-
DC resistance: 50 ohm ±7% (25°C)
-
Frequency under load:> 600 Hz
-
No-load frequency:> 1000 Hz
-
Torque:> 34.3 mN * m (120 Hz)
-
Self-positioning moment:> 34.3 mN * m
-
Stopping torque: 600-1200 g * cm
-
Pull: 300g * cm
-
Insulation resistance:> 10 MΩ (500 V)
-
Insulation class: A
-
Noise: <35dB (120Hz, no load, 10cm)
-
Weight: 40g
Thus, in a 4-step mode, a motor with a gearbox makes 2048 steps per revolution, in an 8-step mode - 4096. It is a half-step mode (8-step control signal sequence) that is recommended by the technical documentation.

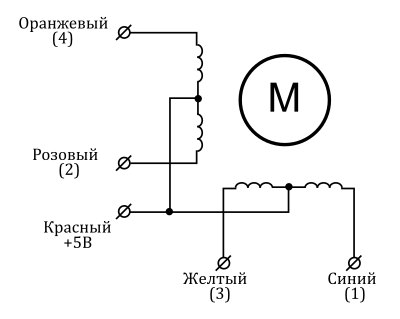
Connection to the ULN2003 controller A (blue), B (pink), C (yellow), D (Orange), E (red, middle lead of windings).
The driver board has a connector for connecting a stepper motor and for powering the driver. The LEDs indicate the status of the power supply to the motor phase.
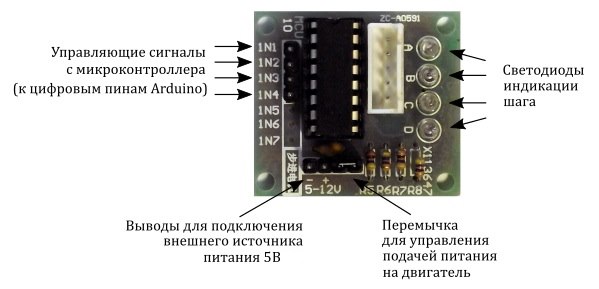
Also located on the side is a jumper (two pins under four resistors), the installation of which allows you to supply power to the stepper motor. It is not recommended to supply power from the Arduino controller as the motor draws a lot of current and can damage the controller. The most suitable way is to power it from a 5V AC adapter (power supply) with a current of at least 1A or a battery. If different power supplies are used to power the Arduino and the motor, then the ground pins of the supplies must be connected together. The four control inputs are labeled IN1-IN4 and should be connected to the four digital pins of the Arduino.
The Stepper standard library that comes with the Arduino IDE only supports full stepping and has very limited capabilities. It can only be used in very simple applications that only use one motor. Using the Stepper library to control the 28BYJ-48 is not the most efficient solution.
A better solution is to use the Accel Stepper library. This library works very well in conjunction with the 28BYJ-48 stepper motor (the motor barely heats up), and also supports acceleration, which allows you to make the motor spin faster.












 The data presented in the product description are for reference only and may differ from those indicated by the manufacturer.
The data presented in the product description are for reference only and may differ from those indicated by the manufacturer.